4WD Outdoor Navigation Robot
A 4WD ROS Robot with Autonomous Navigation Capability

Click above to view the demo video
Abstract
This report details the development of a 4WD Outdoor Navigation Robot built on a ROS framework. Integrating hardware components such as an Nvidia Jetson Nano, Arduino Mega, RMCS-2303 Motor Drivers, and 100 RPM DC motors, the system leverages advanced SLAM techniques—including GMapping and RTAB-Map—to achieve robust autonomous navigation in dynamic outdoor environments. The combined research and practical implementation confirm the robot’s efficacy in generating accurate maps and navigating complex terrains.
Introduction
Autonomous navigation is a cornerstone for modern robotic systems, particularly in applications like delivery, surveillance, and exploration. Traditional methods relying solely on encoders or LIDAR may suffer from limitations such as odometry drift or restricted sensor ranges. This project addresses these challenges by integrating multiple sensors and employing advanced SLAM algorithms to generate accurate 2D/3D maps. This report merges details from the project README with comprehensive research findings from our conference paper.
Hardware Setup
The robot features a robust four-wheel drive mechanism with a compact chassis (approximately 250 mm x 300 mm) constructed from aluminium composite panels. Key components include:
- Processing: Nvidia Jetson Nano running ROS for high-level control.
- Control: Arduino Mega and RMCS-2303 Motor Drivers managing four 100 RPM DC motors.
- Sensors: YD-Lidar X4 for mapping, Xbox Kinect for 3D vision, and additional tracking cameras for enhanced odometry.





Simulation and Software Setup
The robot was modeled in Fusion360 and converted to URDF using Fusion2URDF.
Gazebo plugins for differential drive, odometry, and LaserScan were integrated to simulate the robot in a custom environment.
The software stack includes ROS packages such as move_base, gmapping, and RTAB-Map, which work in tandem with sensor inputs to generate accurate maps and enable autonomous navigation.
Installation involves cloning the repository, building the workspace with catkin_make, and resolving dependencies with rosdep.
Methodology
Our approach is twofold:
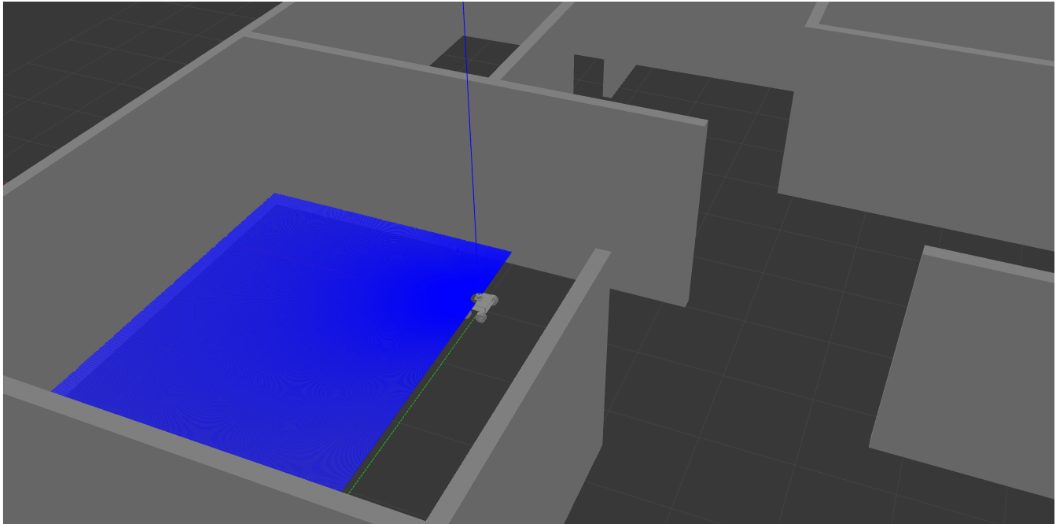
- Simulation Model: A detailed CAD model was developed and tested in Gazebo. The navigation stack utilizes move_base and SLAM algorithms to continuously update the map and compute optimal paths.
- Hardware Integration: The robot fuses data from LIDAR, Kinect, and wheel encoders to improve localization accuracy. An Intel RealSense T265 Tracking Camera further refines the odometry, enabling robust real-world navigation.
Results and Discussion
Simulation tests in Gazebo validated the system's ability to generate both 2D and 3D maps. In real-world trials, the robot effectively navigated dynamic outdoor environments, demonstrating reliable obstacle avoidance and accurate localization. The combination of GMapping for rapid 2D mapping and RTAB-Map for richer 3D spatial awareness provides a comprehensive solution for autonomous navigation in GPS-restricted areas.

Conclusion
The 4WD Outdoor Navigation Robot integrates advanced hardware and software to achieve robust autonomous navigation. By combining detailed simulation with rigorous hardware integration, the robot reliably maps its environment and navigates complex terrains. Future work will focus on optimizing sensor fusion, reducing computational overhead, and extending the operational range to further enhance system performance.