All-Terrain Medical Security Phase Shifting Rover
Abstract
This project report presents the design and development of an All-Terrain Medical Security Phase Shifting Rover. Conceived to address critical rescue and delivery challenges in hazardous or inaccessible areas, the rover is engineered to traverse diverse terrains—land, shallow water, and even limited aerial environments. The prototype features adjustable dimensions, enabling dynamic adaptation to environmental constraints, while integrating multiple sensors for human presence detection, toxic gas monitoring, and remote surveillance. This multifunctional platform aims to facilitate rapid, safe, and efficient disaster response and medical supply delivery.
Introduction
In scenarios where traditional rescue operations are hindered—such as industrial disasters, floods, or pandemics—rapid, remote response becomes imperative. Motivated by the tragic outcomes of events like the Kerala floods and the COVID-19 crisis, this project was initiated to develop a rover capable of reaching areas inaccessible to humans. The design combines a robust, four-wheeled chassis with the unique ability to modify its height and width, thereby navigating through narrow passages, rugged terrain, and obstacles with ease.
Design and Construction
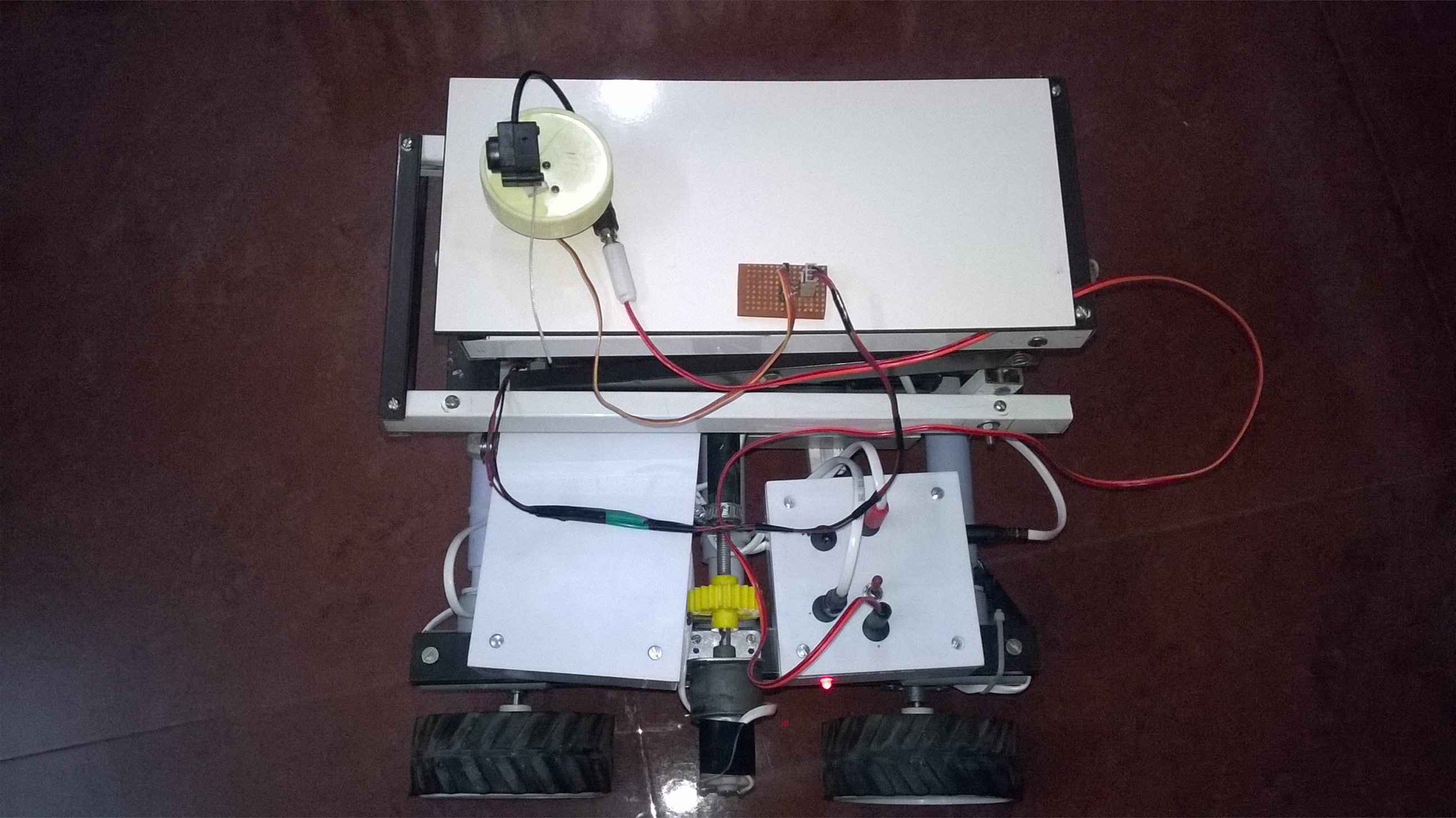
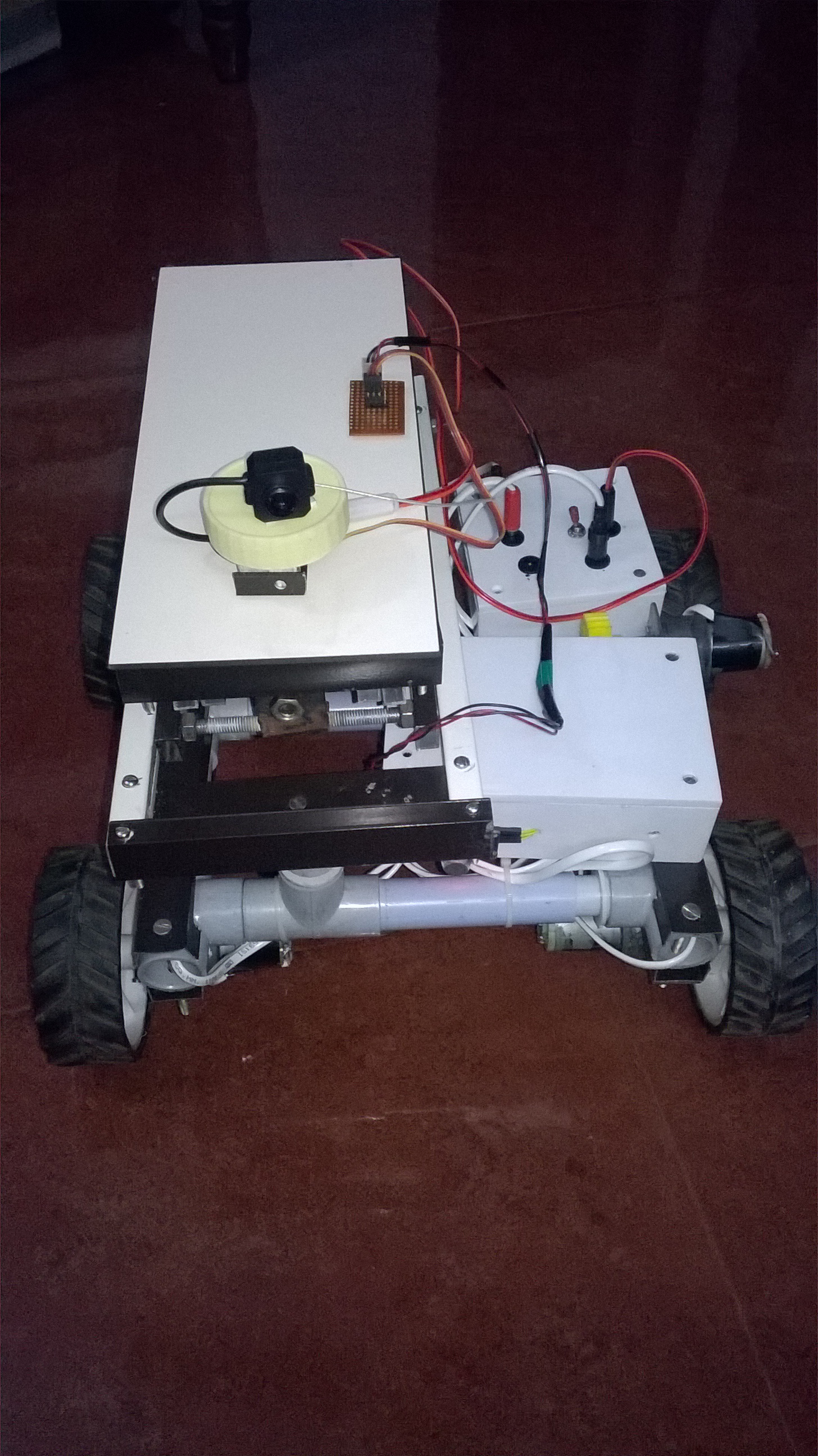
The rover—termed the Phase Shifting Robot (PSR)—incorporates a dual-section structure:
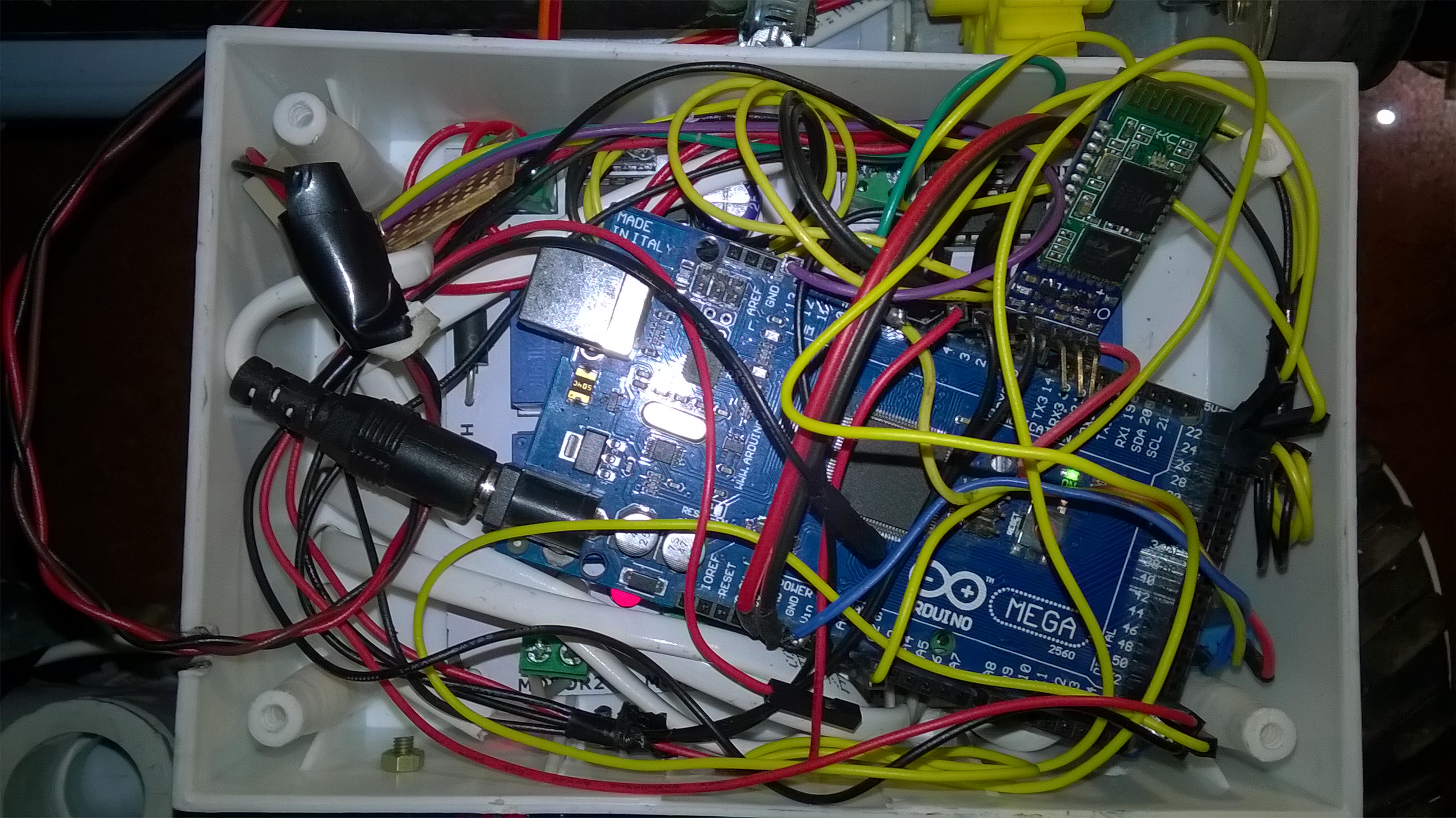
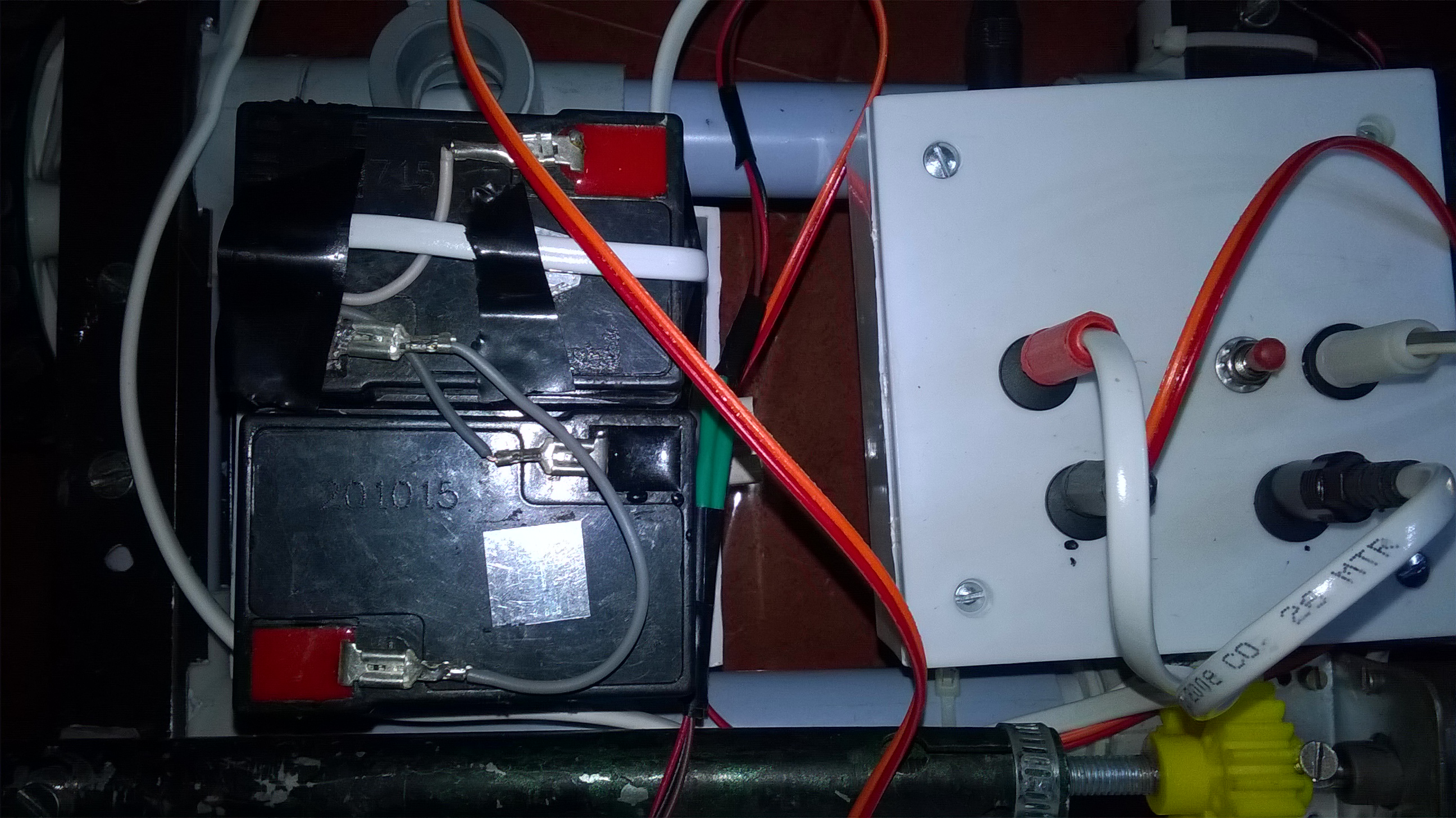
- Base Frame: Constructed from aluminum channels and PVC pipes, the base frame provides a rigid platform that houses the batteries and electronic components. A threaded rod mechanism, actuated by a 100 RPM Johnson DC motor, enables lateral (width) adjustment.
- Collapsible Top Portion: The upper section, assembled from sixteen aluminum channels arranged in a pantograph configuration and operated by a 300 RPM DC motor, facilitates vertical (height) adjustment. This section supports the mounting of a wireless camera and other critical sensors.


Functional Capabilities
The PSR is designed to excel in multi-faceted operational scenarios:
- Climbing and Terrain Negotiation: Powered by four 100 RPM DC motors with high-grip wheels, the rover is capable of ascending slopes and navigating rough terrain.
- Dynamic Dimension Adjustment: The integrated mechanisms allow independent control of width and height, enabling the rover to adapt its form factor in real time to traverse narrow passages or obstacles.
- Remote Surveillance and Sensing: A wireless camera provides live video feed, while onboard sensors—including toxic gas detectors and human presence detectors—ensure comprehensive environmental monitoring.
- Drone Integration: A dedicated drone pad atop the adjustable structure allows deployment of a drone for aerial surveillance and rapid delivery of essential supplies, extending the rover’s operational envelope.
Novelty and Analysis
What sets this rover apart is its unprecedented adaptability. Unlike conventional rescue robots that are limited to a single domain, the PSR can reconfigure its dimensions dynamically, thereby overcoming the challenges posed by diverse and unpredictable environments. Its multifunctional design not only enhances operational reach but also minimizes human risk during emergency response.
Conclusion
The All-Terrain Medical Security Phase Shifting Rover represents a significant stride in robotic rescue and medical delivery applications. With its adaptable structure, robust sensor suite, and integrated drone capabilities, the prototype demonstrates the potential to revolutionize remote operations in disaster-stricken or hazardous environments. Future enhancements will focus on integrating advanced ROS-based control, improved communication modules, and additional payload capabilities.
Future Scope
Planned improvements include:
- Integration with ROS and SLAM-based path planning using LIDAR and GPS modules for enhanced autonomous navigation.
- Upgrading wireless communication to satellite or LoRa modules for extended operational range.
- Incorporation of a 6-axis robotic arm for complex manipulation tasks in emergency scenarios.
- Advanced sensor integration for first aid kit deployment, real-time vital sign monitoring, and smart scene detection.