Multi-Map Navigation with AR100 AMR
Wormhole-Based Autonomous Navigation Across Multiple Rooms
Abstract
This project demonstrates a novel approach to multi-map, multi-room autonomous navigation using wormhole-based transitions on the ANSCER AR100 Autonomous Mobile Robot (AMR). The system enables seamless navigation across different mapped environments by intelligently managing map switching and route planning through a custom wormhole database, making it ideal for large facilities with multiple distinct areas.
1. Introduction
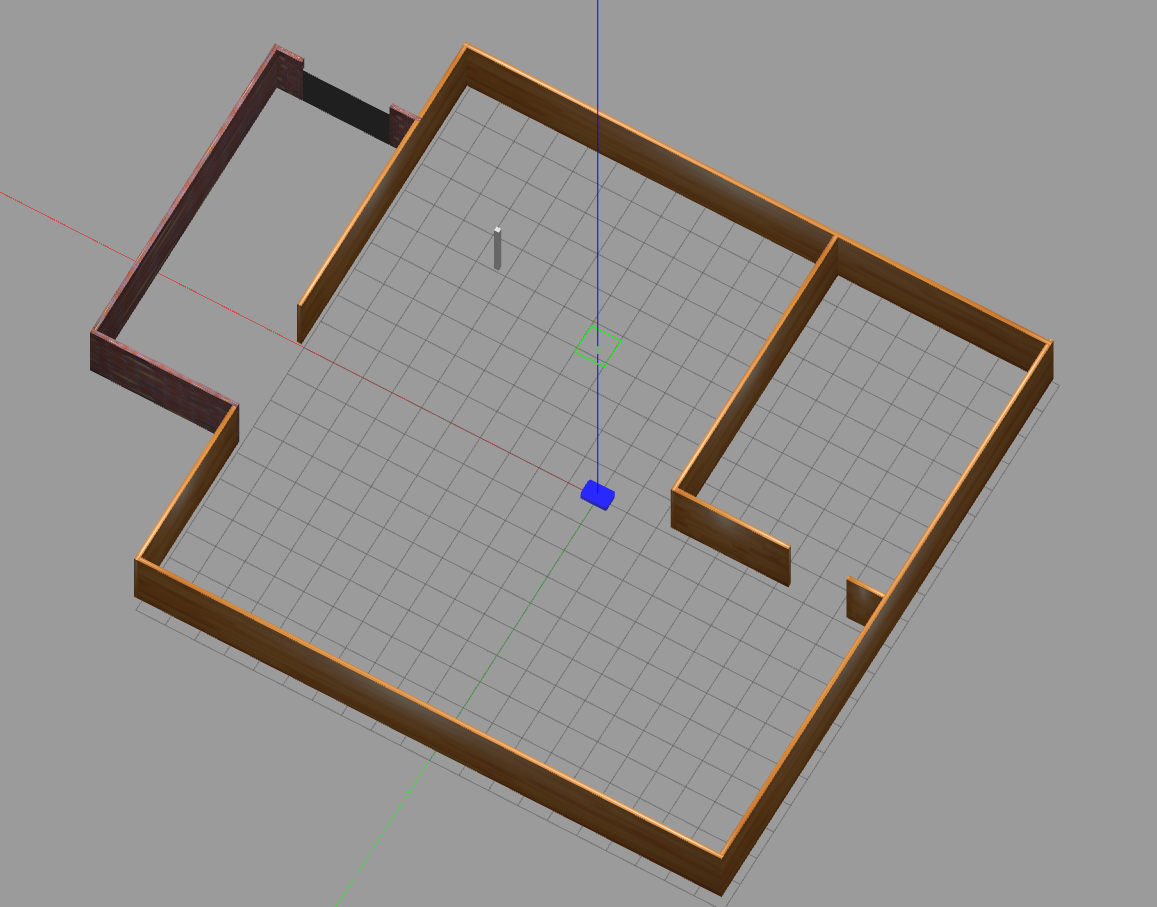
Traditional robot navigation systems typically operate within a single map, limiting their ability to navigate large, multi-room environments efficiently. This project addresses this limitation by implementing a "wormhole" concept—predefined transition points between maps that allow the robot to seamlessly move between different mapped areas. The system was developed and tested using the AR100 robot by Anscer Robotics in a custom multi-room simulation environment.
2. System Architecture
The system comprises three main components working together to enable multi-map navigation:
- WormholeManager: Connects to an SQLite database to retrieve wormhole data and compute direct/indirect transitions between maps.
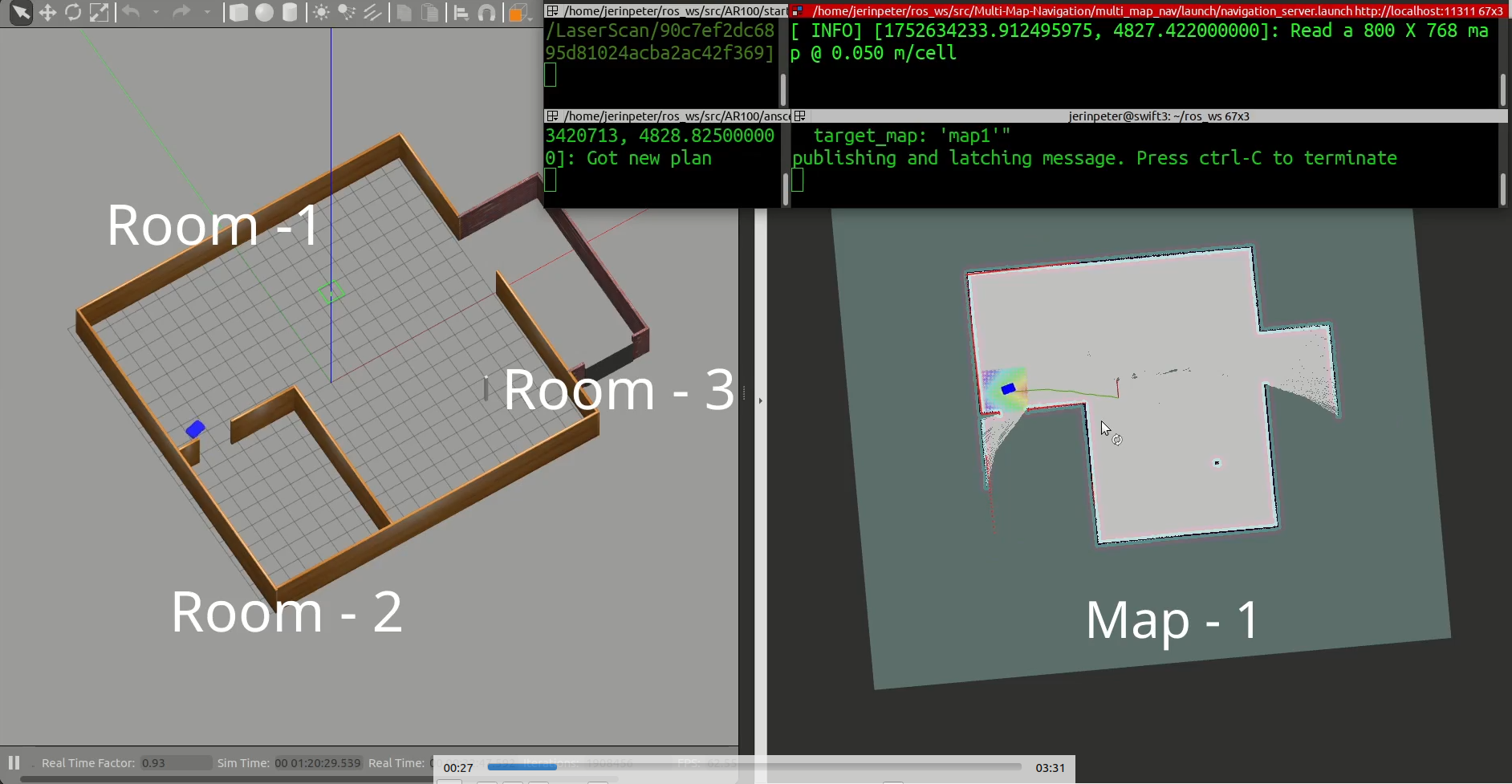
- MapSwitcher: Dynamically loads map files (.pgm/.yaml) and controls the map_server for seamless map transitions.
- NavigationServer: A custom ROS Action Server that accepts navigation goals and determines whether to use direct move_base calls or wormhole-based routing.
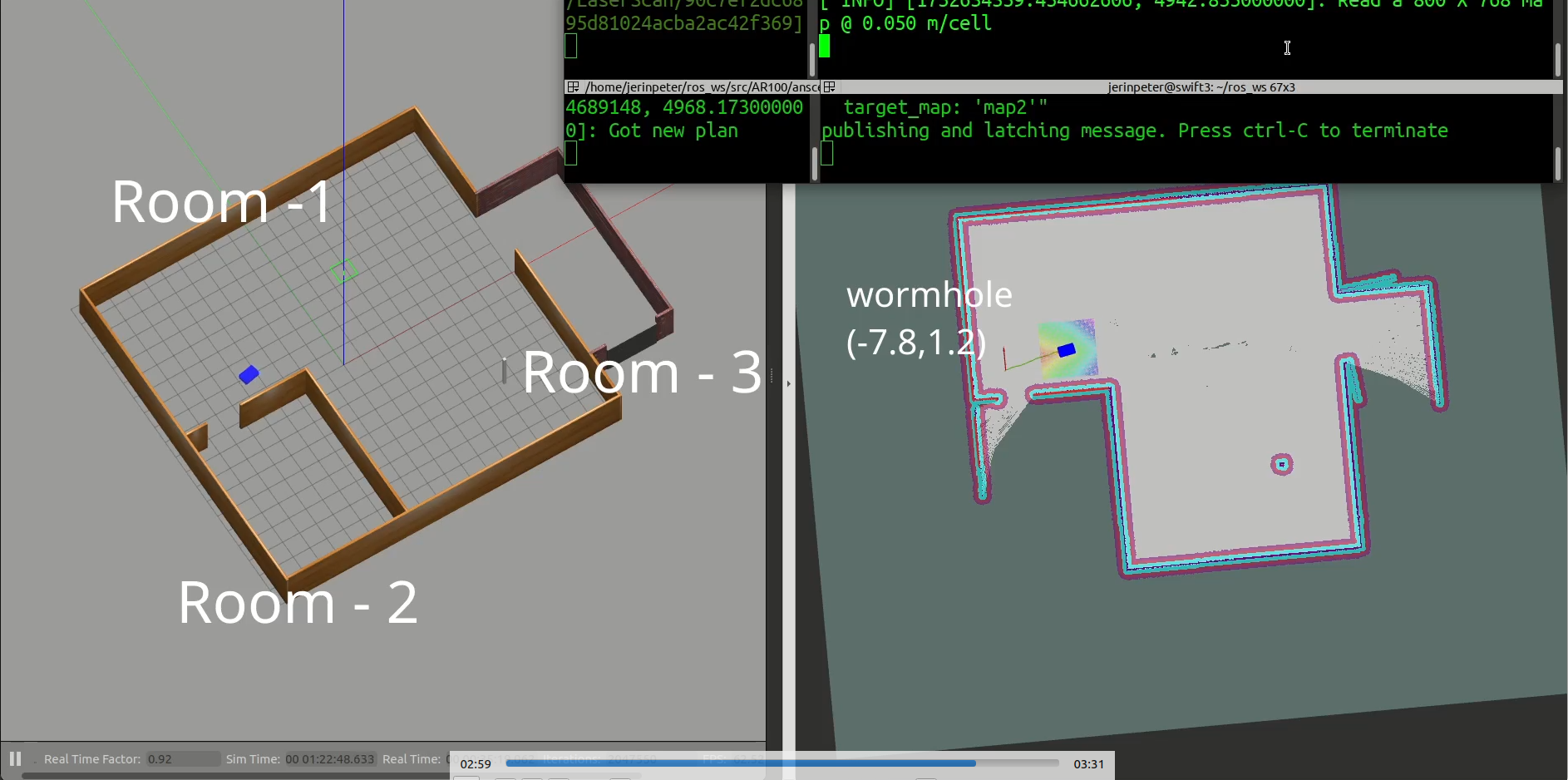
3. Wormhole Database
The SQLite database stores all wormhole connections, enabling the robot to find paths between different maps:
| from_map | to_map | from_x | from_y |
|---|---|---|---|
| map1 | map2 | -7.8 | 1.2 |
| map2 | map1 | -7.8 | 1.0 |
| map1 | map3 | 8.5 | 2.5 |
| map3 | map1 | 8.5 | 2.5 |
4. Navigation Flow
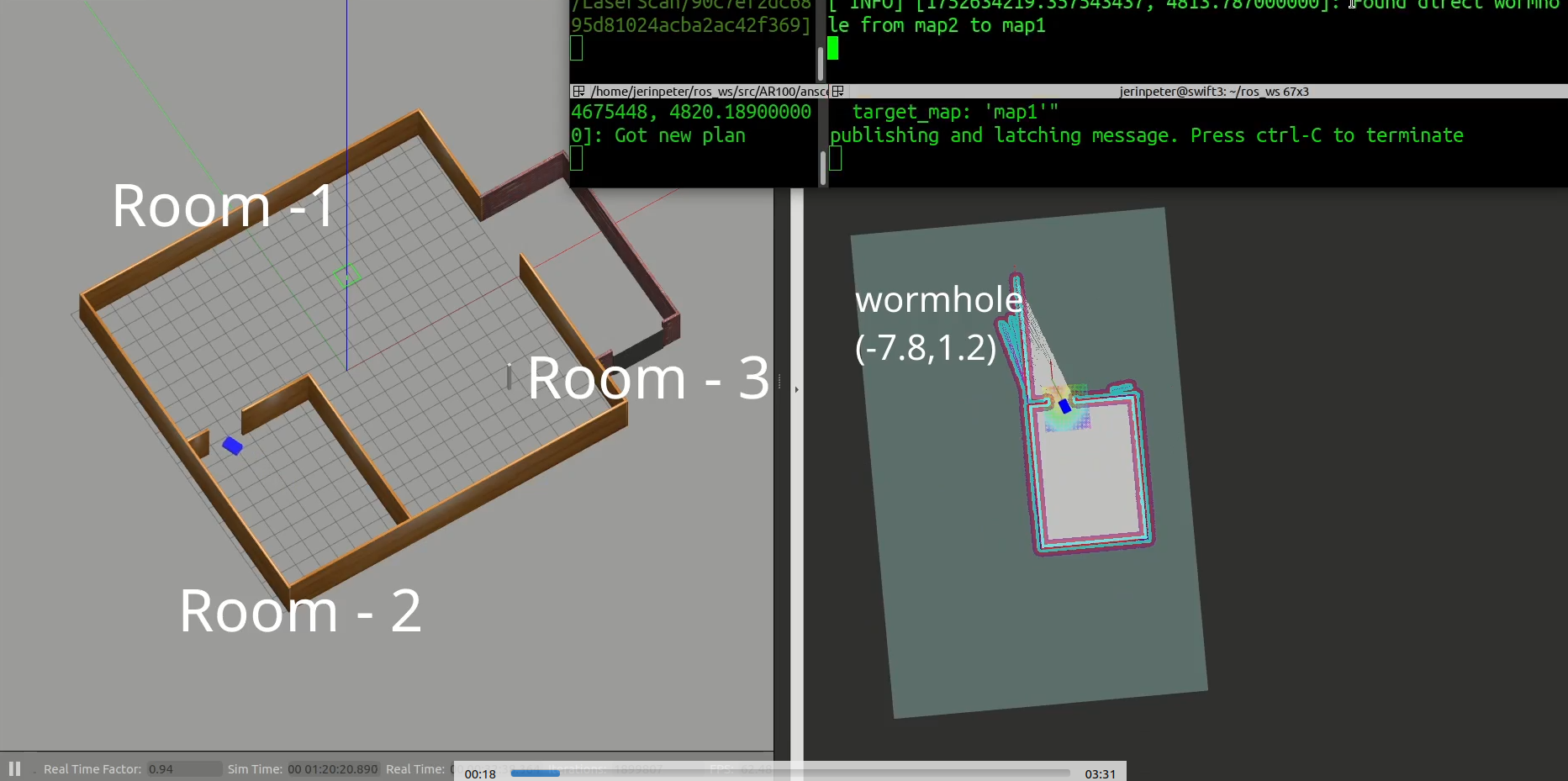
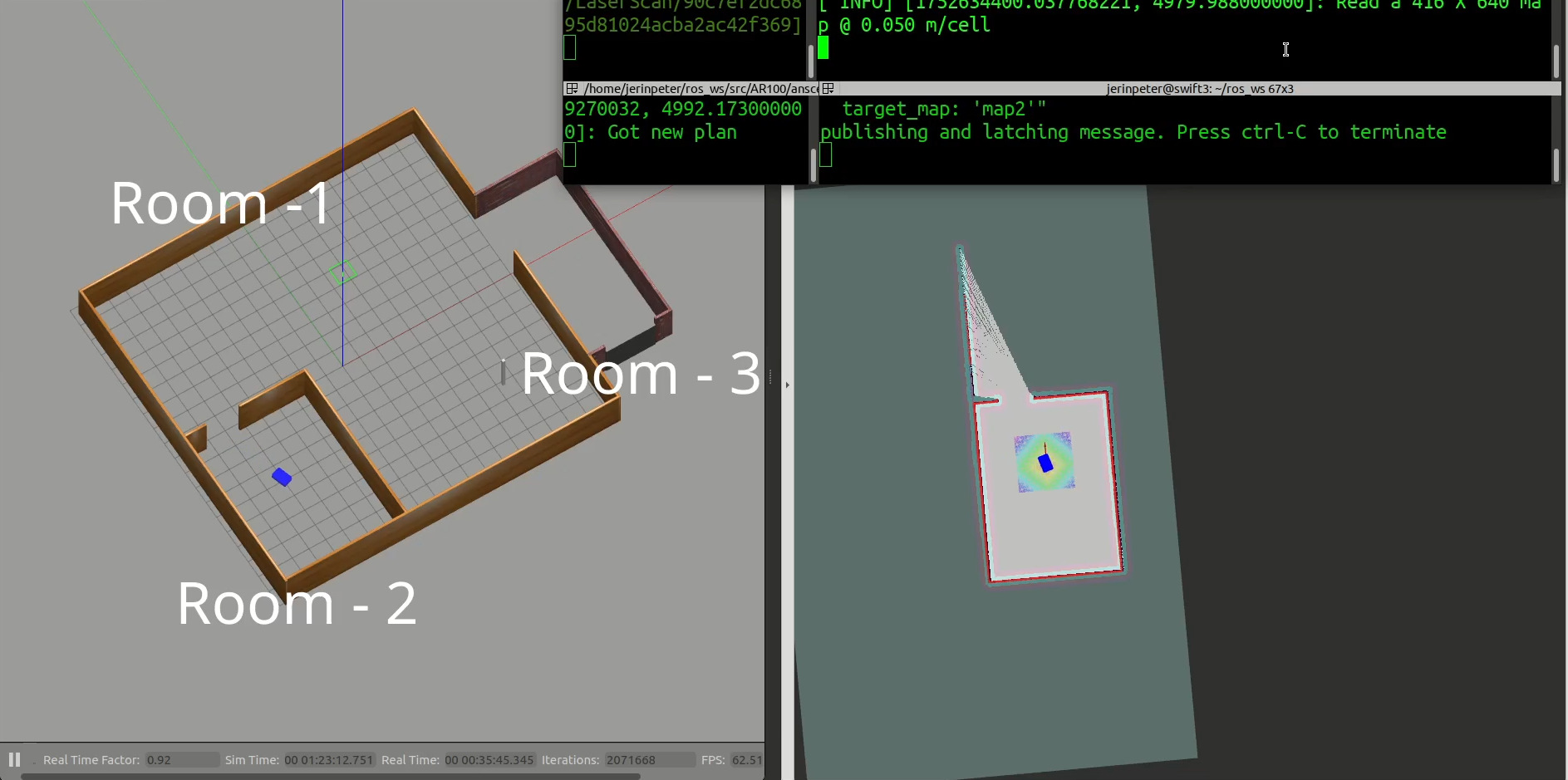
4.1 Direct Transition
When the target is in an adjacent map with a direct wormhole connection:
- Navigate to the wormhole location in the current map
- Switch to the target map
- Continue navigation to the final goal
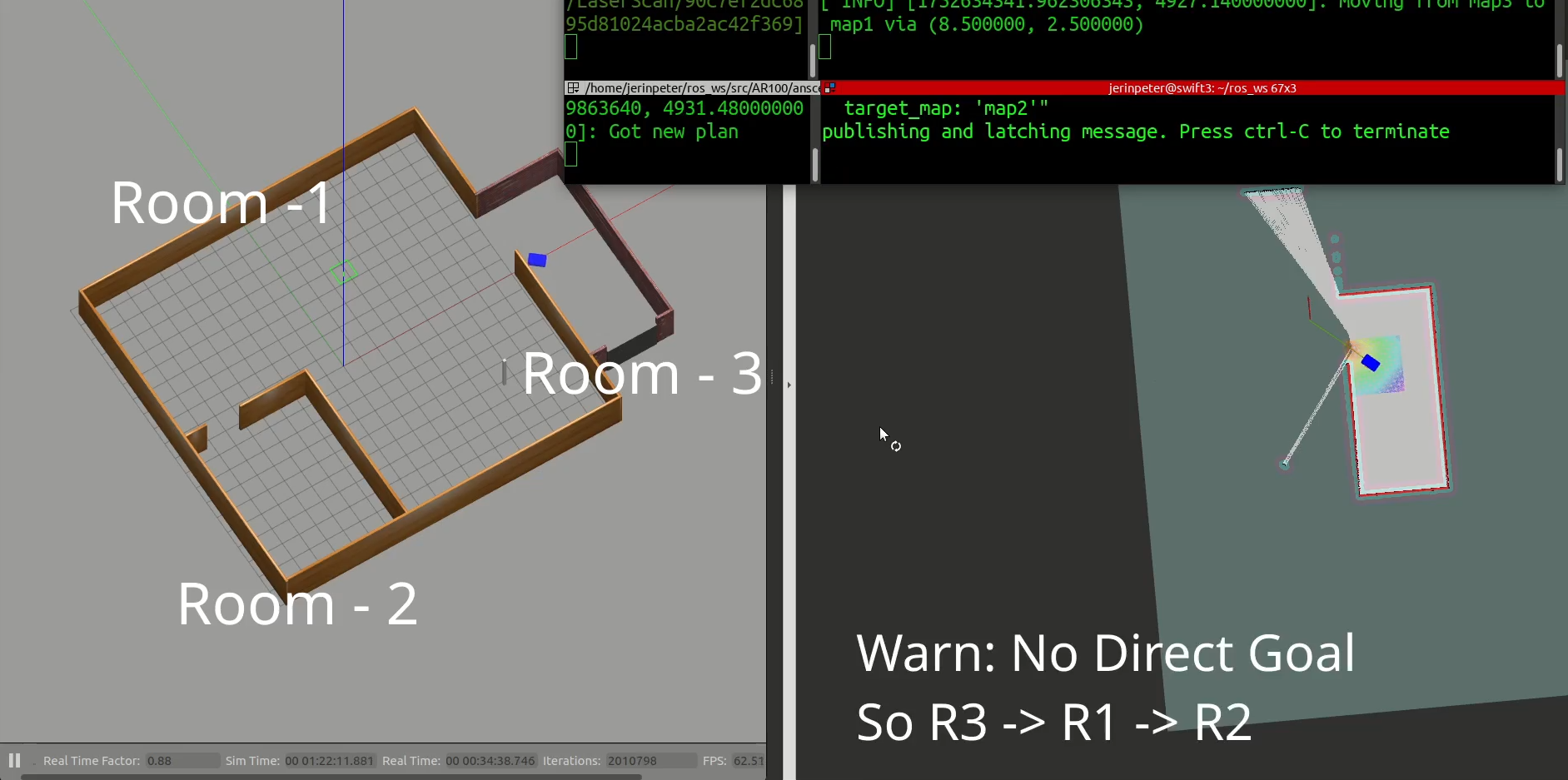
4.2 Indirect Transition via Hub
When there's no direct wormhole, the system routes through an intermediate "hub" map:
- Navigate to the hub map wormhole
- Switch to hub, then navigate to the next wormhole
- Switch to target map and reach the final destination
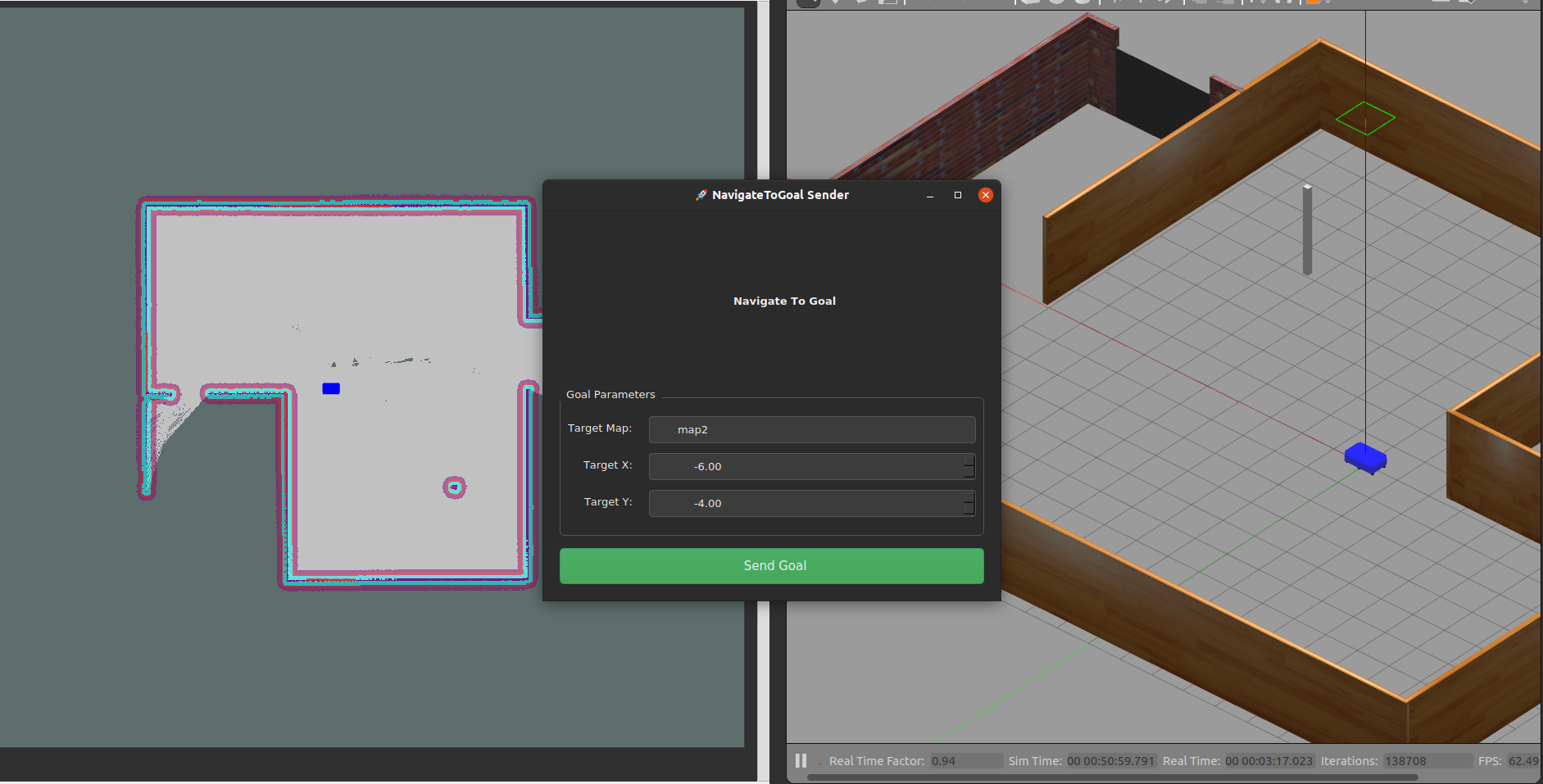
5. User Interface
A PyQT GUI was developed for easy goal specification, allowing users to input target coordinates and the destination map name:
6. Key Features
- 🛣️ Wormhole Navigation: Seamless transitions across rooms/maps using predefined connection points
- 💾 SQLite Database: Persistent storage for wormhole mappings with easy configuration
- 🔄 Dynamic Map Switching: Real-time map server control for smooth transitions
- ⚙️ move_base Integration: Full compatibility with ROS navigation stack
- 🛰️ Actionlib Interface: Standard ROS action server for goal delivery and feedback
- 🧩 Modular Architecture: Scalable design for adding new maps and wormholes
7. Technical Implementation
Custom Action Definition
# Goal
float64 target_x
float64 target_y
string target_map
---
# Result
bool success
string message
---
# Feedback
string feedback_msgCore Components
navigation_server.cpp— Handles navigation requests and manages map transitionsmap_switcher.cpp— Controls map_server for dynamic map loadingwormhole_manager.cpp— Loads wormhole data and determines optimal routes
8. Future Work
- Implement orientation handling for smoother wormhole transitions
- Add waypoint validity checks to ensure coordinates are within map bounds
- Implement goal preemption handling for dynamic task reassignment
- Extend to support heterogeneous robot fleets
9. Conclusion
This project provides a modular and scalable framework for multi-environment navigation using ROS and SQLite. The wormhole-based approach enables robots to seamlessly traverse large facilities with multiple distinct areas, making it ideal for applications in smart facilities, research environments, and warehouse automation. The system demonstrates the feasibility of extending single-map navigation to complex multi-room scenarios without requiring a single unified map.