Self-Driving Car Project
Advanced Autonomous Driving Using Open-Source Frameworks
This project presents a comprehensive implementation of a self-driving car system using open-source software and hardware. It integrates perception, decision-making, and control modules to achieve autonomous navigation in a simulated environment.
Abstract
This project implements a self-driving car system that combines computer vision, sensor data processing, and advanced control algorithms using ROS. The system leverages a modular architecture to detect road features, make real-time decisions, and safely navigate through simulated environments. Extensive testing has validated the system's performance under various conditions.
Introduction
Autonomous driving has become a cornerstone of modern robotics and artificial intelligence research. This project, developed using the selfdrivingcar-master codebase, demonstrates how open-source frameworks and standard hardware components can be combined to create an effective self-driving system. Through a series of iterative tests and refinements, the system has been optimized for robust perception, decision-making, and control.
Methodology
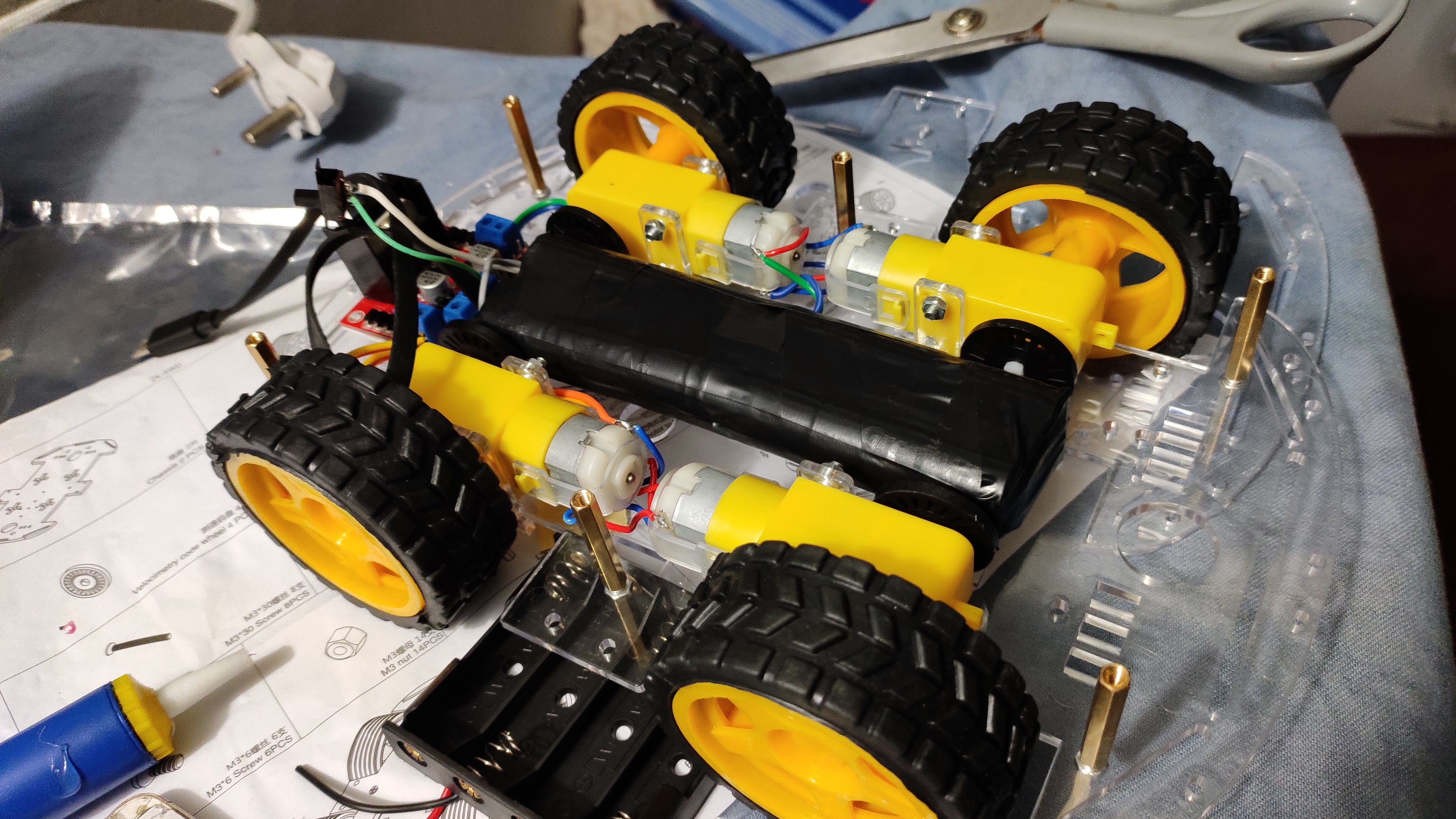
The project is organized into several key modules:
- Perception: Utilizes camera feeds and sensor data to detect road lanes, obstacles, and traffic signals.
- Decision-Making: Implements path planning algorithms that generate safe and efficient trajectories.
- Control: Employs PID controllers to convert high-level commands into actuator signals for steering and throttle control.
- Software Integration: The system is built on ROS, enabling modular communication between perception, planning, and control nodes.
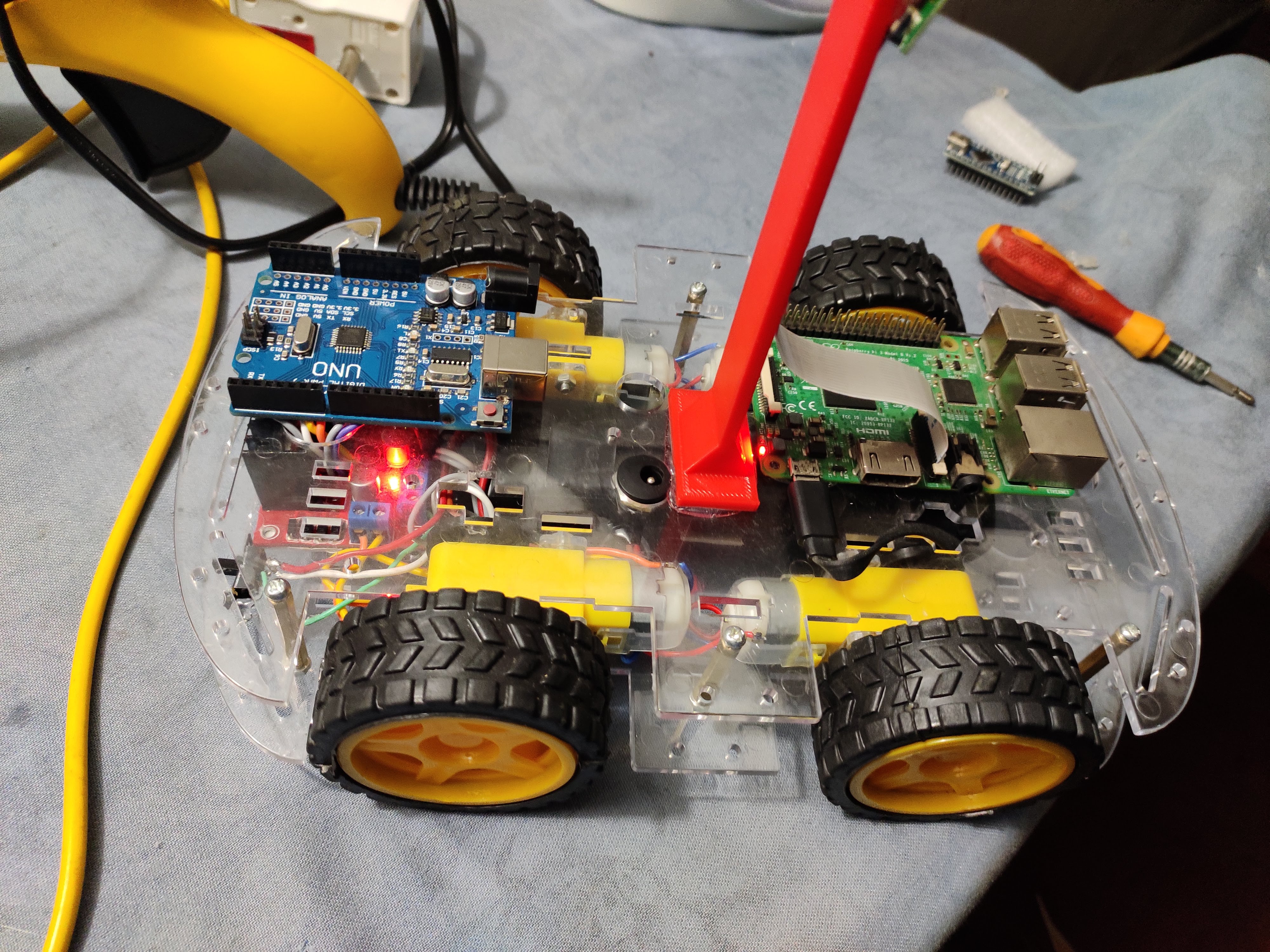
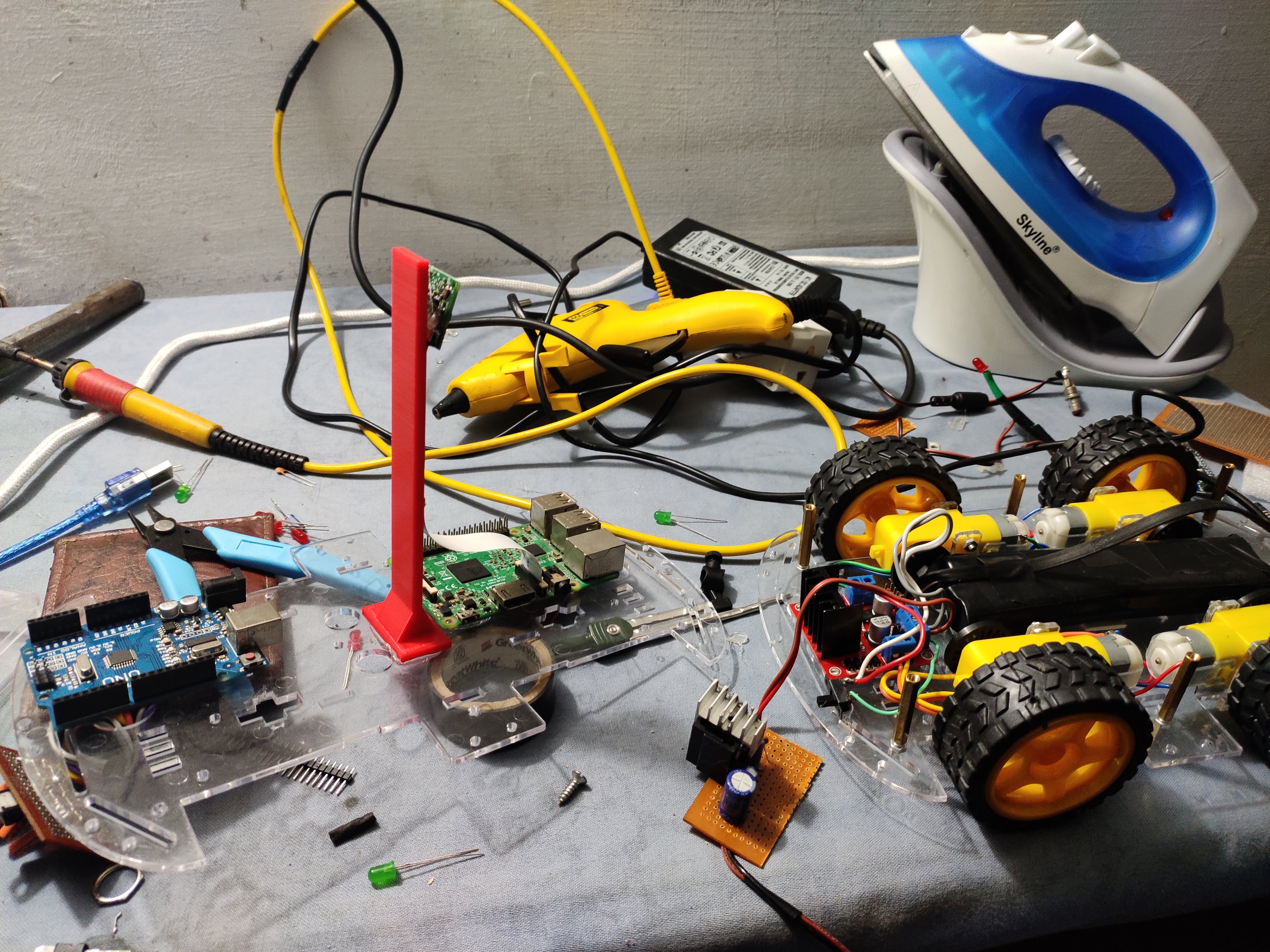
System Architecture
The self-driving car is developed with a modular design, where individual nodes in ROS communicate seamlessly to process sensor inputs, perform object detection, plan trajectories, and execute control commands. The architecture supports scalability and real-time decision-making in complex scenarios.

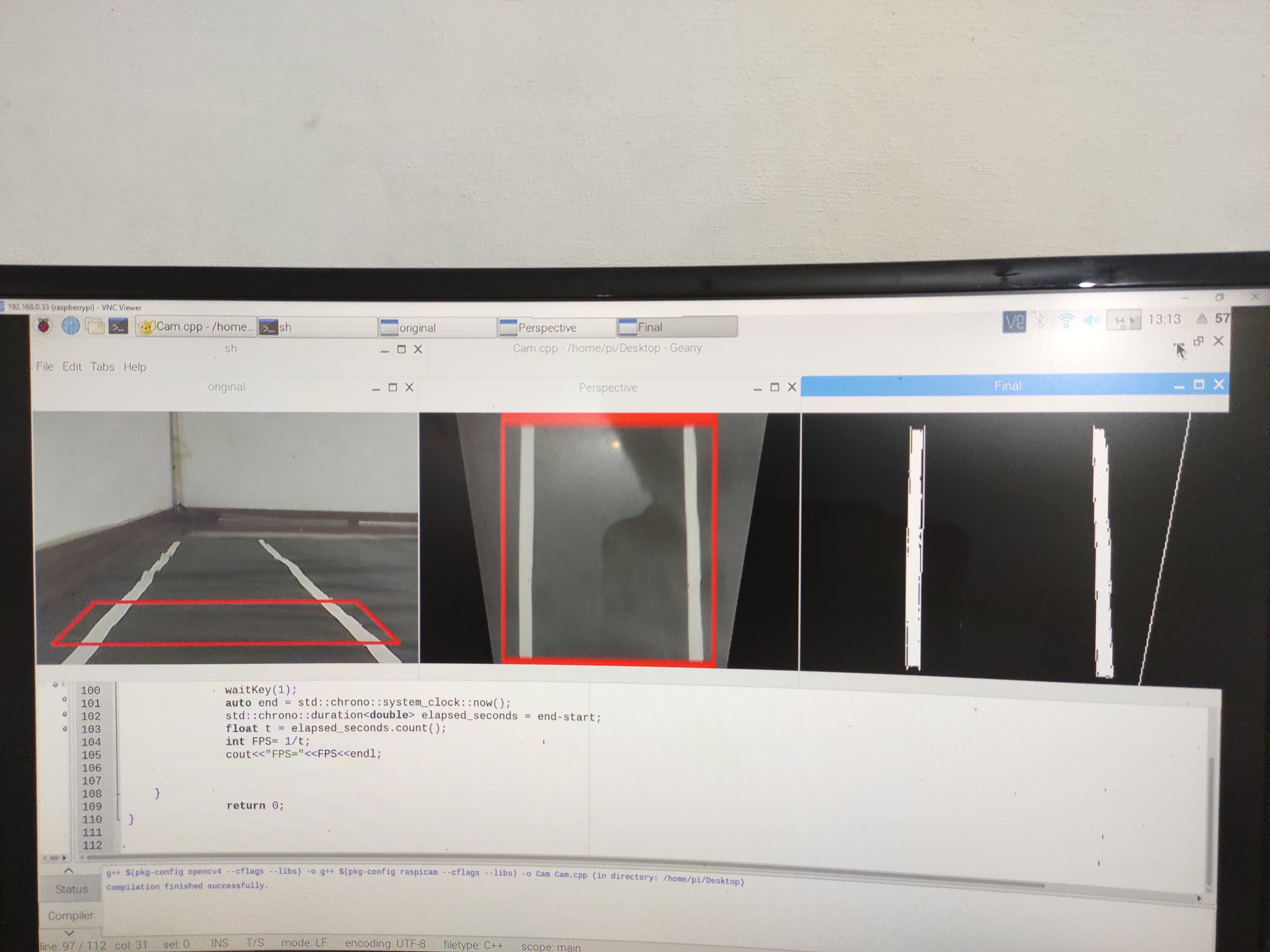
Experimental Results
The self-driving car was tested extensively in simulation, where it successfully navigated complex routes, detected obstacles, and adhered to traffic rules. The performance metrics indicate a high level of robustness and efficiency in autonomous decision-making.
Conclusion and Future Work
This project demonstrates that a fully autonomous self-driving system can be developed using open-source tools and modular hardware. Future work will focus on refining perception algorithms, incorporating additional sensors for improved environmental understanding, and testing the system under more diverse and challenging real-world conditions.